-
Markieren
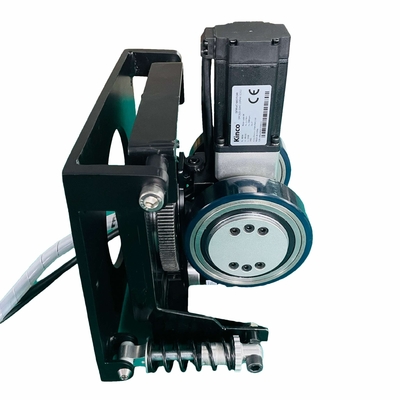
Agv-Bewegungslenkrad
,Lenkrad des Motor 1.27Nm
,differenziales Rad 100kg
-
BewegungsmarkeKinco
-
BewegungsmodellSMC60S-0040-30MAK-5DSU
-
BewegungsprüferFD124S-CA-000
-
Bewertetes Drehmoment1.27Nm
-
Winkel-SensorAbsoluter Kodierer
-
GetriebeZweistufiger Planet
-
LibricationFett
-
MaterialStahl
-
HerkunftsortGuangzhou, China
-
MarkennameZHLUN
-
ZertifizierungISO9001
-
ModellnummerZL-190
-
Min BestellmengeVerkäuflich
-
PreisNegotiable
-
Verpackung InformationenVerpackung: Holzkiste
-
Lieferzeit25 Tage
-
ZahlungsbedingungenL/C, T/T, Western Union
-
Versorgungsmaterial-Fähigkeit1000 Stücke pro Monat
Agv-Bewegungslenkrad, differenziales Rad 1.27Nm 100kg

Agv-differenzialer Lenkrad-Antrieb mit der Dämpfung Supprot-Platten-Gebrauch für kleinen Drehendurchmesser
ZHLUN hat einen in hohem Grade integrierten Radnaben-Antrieb, der alle Funktionselemente, wie das Rad, ein Hochpräzisionsplanetengetriebe, ein leistungsfähiger Elektromotor und eine Bremse und eine Elektronik kombiniert, in eine Sammellösung entwickelt. Dieses modulare und ersteigbare System rühmt sich Hochleistung in einer Kompaktbauweise und lässt Benutzer Anpassungen zur Tragfähigkeit, zum Drehmoment, zu den Schnittstellen, zum Sensor-System und zu den Steuerprofilen machen.
Eine hohe Stufe der vertikalen Integration in der Teilproduktion, in der Bewegungswicklung und in den Versammlungshilfen kurze Lieferzeiten erzielen.
![]()
Eigenschaft
Höchstleistungsdichte
Hohe Radiallasten und ständig hohe Beschleunigung und Geschwindigkeit
Lange Nutzungsdauer
Ansteuersystem bestimmt für Leistungsfähigkeit mit einem langlebigen PUR-Rad
Niedriger Stand der Wartung
Komponenten können ersetzte einzeln dank die Modularbauweise sein
Intelligentes Ansteuersystem
Stecker- u. Spielfunktion und eine zentrale Parameterkontrolle unter Verwendung eines optionalen Sensor-Systems
Hohe Stufe der Integration
Alle Funktionselemente untergebracht in einem kompakten Raum mit minimalem Gewicht
Umfassende Kommunikation
Umfassendes Antriebskontrollsystem als dank einer Eachse Standardschnittstellen (z.B. CANopen, RS485)
![]()
![]()
ZHLUN-Rad-Ansteuersysteme die Flexibilität zur Verfügung stellen, eine große Vielfalt von fordernden Geschwindigkeits- und Gewichtskapazitätsanforderungen zu behandeln. Die Vielseitigkeit, die durch die zahlreichen Bewegungs-, Getriebe- und Rad-Antriebskombinationen angeboten wird, lässt kundenspezifische hergestellte Lösungen zu.
Unsere Motoren sind entworfen, um Ihre Bedingungen zu erfüllen, ob die eine AGV-Anwendung ist, die eine erhebliche Menge des Drehmoments oder der ultra-kompakten äußeren Rotorlösung erfordert. Wir bieten eine verschiedene Produktlinie an, die eine große Vielfalt von Geschwindigkeiten, von Drehmomentstrecken, von Feedbackwahlen, von Verbindungsstückarten und von Befestigungsmöglichkeiten zur Verfügung stellen.
![]()
Sie werden in den driverless Verkehrssystemen (DTS) benutzt, oder „automatisierte geführte Fahrzeuge (AGVs)“ oder Shuttle.
Und unsere Antriebe erzielen bis 10 m/s (36 km/h), befördern einige Tonnen oder erhalten 1.000 Watt aus 4 Kilogramm heraus Baugewicht.
Und ja, schließt jetzt einen Naben-Antrieb des lenkbaren rades und beispiellose Wegplanung und das Fahren Leistung mit ein.
![]()
Das Lenkrad ist eine mechanische Struktur, die den Antriebsmotor, Lenkmotor, Reduzierer, etc. integriert. Das Lenkrad hat hohe Integration und starke Anpassungsfähigkeit. Mit dem gleichen Servosteuerungssystem (Kontrolleur, Servofahrer), kann es AGV schnell installieren, bewegt Roboter.
Das Lenkrad ist ein Integrierungsantriebsmotor der integrierten mechanischen Struktur, Lenkmotor, Planetengetriebe, etc. Es integriert Produkt-, Gehen, Zugkraft- und Steuerfunktionen und kann schwerere Waren laden und schleppen. Es kann AGVs, mobile Roboter, etc. schnell tadellos, einsetzen die Anwendungsbedingungen von AGV zu erfüllen.
Deshalb ist Lenkrad-Antrieb die Entwicklungsrichtung von AGV-Anwendungen. Verglichen mit der differenzialen Geschwindigkeitsregelungsmethode traditioneller AGV-Laufkatze, hat das Lenkrad hohe Integration, starke Anpassungsfähigkeit, höhere Präzision und schnellere Antwort, wenn es mit dem Servosystem verwendet wird.
Unsere Produkte werden auf der ganzen Welt verkauft. Sie können sich auf den gesamten Prozess unserer Produkte verlassen.